The School of Cities understands why cities matter – for sustainability, prosperity, inclusion, and justice. Providing public access to the research and analysis that informs change is one of our primary objectives. Here you will find a growing set of insights into the most pressing issues of our time, in the form of publications, maps and videos and created in collaboration with affiliated faculty, visiting scholars, expert practitioners, students, and community organizations.

City Research Insights

A policy brief series translating academic research into impactful solutions. The School of Cities seeks to leverage our extraordinary community of urbanists and urban-oriented researchers to create a rich, multidisciplinary community of urban faculty, researchers, and students across disciplines and perspectives.
Maps & Data Visualizations

We create public-facing and accessible interactive maps and data visualizations aimed disseminating academic research to a broader audience, visual storytelling focused on important urban issues, and creating new modes for understanding our cities.
Downtown Recovery
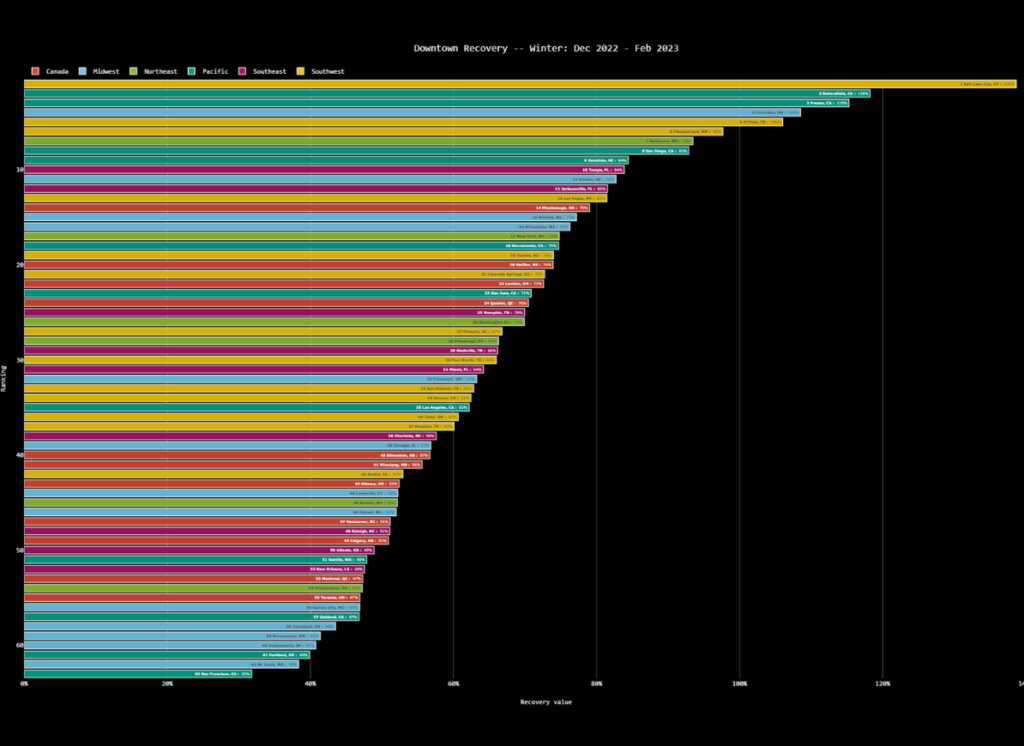
The downtown recovery research, a collaboration between School of Cities and the Institute of Governmental Studies at UC Berkeley, uses mobile phone data to track visits over time to 62 downtown areas across North America and to compare recent eceonomic activity to pre-pandemic levels.
City Beats Blog

The City Beats Blog invites experts affiliated with the School of Cities to publish essays, responses and reflections in a variety of formats and at any stage in the development of new ideas or research.
Knowledge Café

The Knowledge Café at the School of Cities is a monthly speaking opportunity for the tri-campus community of U of T faculty and researchers to present analysis and highlights of their research on a theme that is important and relevant to cities.
Videos
The School of Cities is committed to mobilizing knowledge in innovative and accessible ways. We work with communities, scholars, policymakers and visual creators to make videos that are informative, impactful and approachable. Check back regularly for new video stories about the most pressing urban challenges of our time.